포스텍 컴공과 컴퓨터비전 연구팀 개발…대량 데이터 요구하는 기존 모델 한계 극복
 | | 포항공과대학교 컴퓨터공학과 연구팀이 대량의 학습 데이터를 요구하는 기존 3차원 자세 추정 모델의 한계를 극복한 '3D 에퀴포스' 인공지능(AI) 모델을 개발했다. /포스텍 |
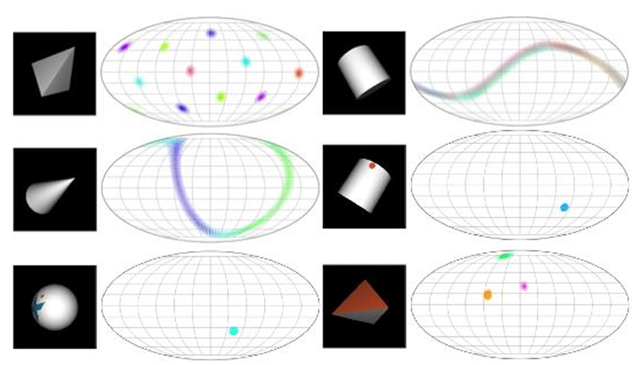
[더팩트 | 김태환 기자] 포항공과대학교(포스텍) 컴퓨터공학과 연구팀이 대량의 학습 데이터를 요구하는 기존 3차원 자세 추정 모델의 한계를 극복한 새로운 기술을 개발해 주목받고 있다. 학습 데이터를 얻기 힘든 극한 상황에서도 자세 추정을 효과적으로 수행할 수 있어 로보틱스, 자율주행차량 등 다양한 분야에 적용이 가능할 것으로 보인다. 포스텍 컴공과 이종민 연구원(조민수 교수 연구실)이 소속된 컴퓨터비전 연구팀(CVLab)은 '극소수의 데이터로도 학습 가능한 3차원 자세를 추정하는 AI 모델'(3D EquiPose, 3D 에퀴포스)을 개발했다고 13일 밝혔다. 이 기술은 등변 네트워크 (Equivariant Network)를 기반으로 해 기존 3차원 자세 추정 모델의 한계를 극복한 것으로 평가받고 있다. 기존의 3차원 자세 추정 모델들은 수많은 데이터셋을 인간이 직접 레이블링(분류)해 비용이 많이 들어갔다. 3D 에퀴포스는 이러한 한계를 극복해, 적은 학습데이터로도 실제 산업 현장에 사용할 수 있는 수준의 자세 추정을 할 수 있다고 연구팀은 설명했다. 이를 위해 3D 에퀴포스는 △위그너-디 표현법 (Wigner-D representation) △3차원 회전 등변 네트워크 (3D SO Equivariant network) △주파수 영역 특화 회귀함수 (frequency-domain regression loss) 등을 적용했다. 이러한 새로운 기법들을 활용해 학습 불안정성 극복, 시나리오 일반화, 효과적 학습 등을 지원할 수 있다고 연구팀은 밝혔다.  | | '극소수의 데이터로도 학습 가능한 3차원 자세를 추정하는 AI 모델' 논문 제 1저자인 이종민 포스텍 연구원. /포스텍 |
특히 기존의 3차원 자세 추정 모델들은 학습 때 고려하지 않은 시나리오 (코너 케이스, 엣지 케이스)에 대한 일반화가 어려워 실제 산업 현장 적용이 제한적이였다. 3D 에퀴포스는 학습 때 고려하지 않은 시나리오에 대해서도 수학의 군론을 기반으로 하는 등변 네트워크를 통해 정확성을 보장한다. 이러한 정확한 자세 추정은 로봇팔이 물체를 잡을 때 물체를 인식하거나, 가상현실 등에서 사용자가 투영된 물체와 상호작용할 때에 매우 중요하게 활용될 것으로 보인다. 포스텍 관계자는 "3D 에퀴포스 기술은 로보틱스, 가상현실, 자율주행 차량, 공장자동화 등 다양한 산업현장과 신산업에 적용 가능하다"고 설명했다. 한편 이번 연구 결과는 인공지능 및 기계학습 분야의 가장 권위 있는 학술대회인 신경정보처리시스템학회(NeurIPS 2024)에서 발표 논문으로 채택됐다. 신경정보처리시스템학회는 인공지능(AI) 및 딥러닝 분야의 최신 연구 성과를 발표하는 세계적인 행사로, 이번 발표 논문은 엄격한 심사를 통과한 우수한 연구로 평가받고 있다. 연구의 제1저자인 이종민 포스텍 컴퓨터공학과 박사는 "3D EquiPose 는 기존 3차원 자세 추정 모델의 한계를 넘어서, 극소수의 학습데이터로 물체의 기하학적 위치 파악을 가능케 한 기술로, 컴퓨터 비전과 로보틱스 분야의 발전에 중요한 기여를 할 것" 이라고 말했다.
kimthin@tf.co.kr
| 



 등록안내
등록안내 등록안내
등록안내